


By Philip Butterworth-Hayes
Two important deadlines were confirmed during the 2023 Paris Air Show: July 2024 for the start of the Paris Olympic Games, during which the world’s first urban air mobility services will be launched with Volocopter eVTOLs flying three scheduled and two tourist routes over the city, and 2030, when the first Wisk autonomous eVTOL will enter the commercial market.
For the eVTOL industry the UAM 2024 start-date coupled with the extraordinarily aggressive production plans of manufacturers – Archer has said it will built 650 aircraft in its full year of production and 2,300 aircraft a year after that – has brought into sharp focus a major technical challenge which has only recently become apparent: with the first generation of vertiports only able to handle one take-off/landing operation at a time, how can a network-wide, autonomous flow control system be integrated into near terms UAM operations to ensure there are no eVTOLs caught in holding patterns?
During the Paris Air Show and the previous few weeks there was a flurry of industry announcements by research agencies, eVTOL manufacturers and UAM infrastructure providers aimed at streamlining vertiport operations through the introduction of new autonomous management systems.
In April 2022 Wisk and Skyports jointly released a Concept of Operations (ConOps) which identified how autonomous eVTOL aircraft and operators will integrate with vertiports, including interactions with providers of services for UAM (PSUs). But the more recent announcements have taken this several steps forward with Technical University of Munich developing eVTOL flight control software to automate take off and landing phases of flight in windy conditions, EHang and the UAE’s Monarch developing a command-and-control centre to manage UAM operations autonomously, Altaport leading a network of UAM companies to develop an autonomous air and ground vertiport management system to optimise high-tempo, autonomous ground activity (including resource scheduling, surface movement, ground service provisioning, passenger management, and vehicle charging) and Skyway and Moonware announcing a strategic partnership to digitally integrate ground operations into UTM systems, enabling a streamlined airside workflow and extended navigation services from start to end.
According to a Skyway and Moonware announcement:
“The principal challenges involved with eVTOL ground operations are the intrinsic limitations of self-taxiing aircraft, due to battery constraints and range requirements. As more vertiports are developed and brought onto the flight network, adopting standardized systems that can scale across a wide variety of operational requirements is needed.”
The wide-ranging industry/public body consortia developing eVTOL service in Paris and Osaka will have demand and capacity balancing as part of their eco-system planning and the number of flight operations is likely to be strictly controlled. However, if eVTOL manufacturers are able to meet their commercial targets the industry will have to scale quickly – 1,000 eVTOLs flying revenue services by 2030 according to the latest forecasts – by optimising capacity in the air and on the ground at space-limited vertiports. And that means introducing autonomous management systems quickly.
But while industry may be ready for safety critical autonomous management of vertiport airborne and ground based operations, regulators are not.
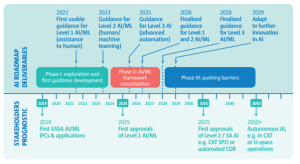
Wisk’s Generation 6 is an autonomous, all-electric, four-seat eVTOL air taxi which includes autonomous flight with human oversight, “a simplified design with fewer moving parts, fully redundant systems, and no single point of failure,” according to Wisk. On the scale of eVTOL/drone autonomy, this is around level 2/3 (see graphic below) and some way behind the unpiloted level 4 EHang 216, which has been flying with passengers on board for some years and is currently 90% the way through its full certification journey with the Civil Aviation Administration of China.

NASA’s Autonomy Verification & Validation Roadmap and Vision 2045 has pencilled in safety critical UAM autonomous operations as a long term (11-25 year) goal.

And in its latest artificial intelligence roadmap, the European Aviation Safety Agency has proposed 2035 for conditional autonomy operations.
easa_ai_roadmap_2_0_2023.pdf
There is also no clear understanding of how local industrial agreements on using autonomy to integrate vertiport airspace management systems with ground-based operations will tie into a wider, systems-of-systems network where flow control operators can (presumably, automatically) strategically manage the network by re-routing or delaying flights if one or two vertiports in the network suddenly become unavailable.
There is considerable erudite research by NASA AUVSI, SESAR – especially in its CORUS X-UAM work – and others underway to examine this issue at a high level. But the challenge the industry faces is that every eVTOL order announced at the Paris Air Show increases the load on the limited planned ground infrastructure for intra-urban operations. In Paris, the first vertiports will have just one to three take-off and landing positions each.
This is not necessarily a deal breaker but it does mean that eVTOL manufacturers may not be able to scale up quite as quickly as they hope. And that regulators may need to adjust their strategic plans for UAM to take account of unexpected advances in industrial AI applications at a local level.
(Image: Kay Rolland)
